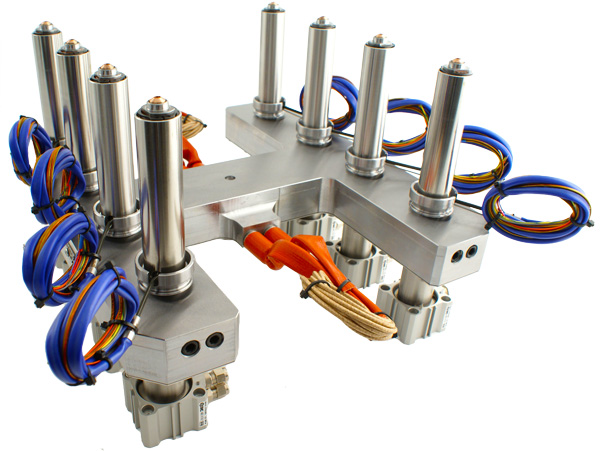
В современных линиях по переработке пластика, где критически важны скорость, точность и безотказность, оснастка, устанавливаемая на манипулятор робота (End-of-Arm Tooling, EOAT), превращается в ключевой элемент автоматизации. Эти системы выступают связующим звеном между программируемым манипулятором (роботом) и изготавливаемыми деталями, выполняя такие задачи, как сортировка отходов, захват, перемещение и последующая обработка пластиковых изделий.
Конфигурация EOAT зависит от конкретной технологической операции и может включать различные модули:
Захватные механизмы: Пневматические, вакуумные или механические устройства, предназначенные для надежного удержания предметов произвольной формы и габаритов.
Вакуумные присоски: Оптимальное решение для манипуляций с легкими и плоскими объектами (панели, листы), гарантирующее их сохранность.
Магнитные адаптеры: Применяются для точной установки металлических элементов в форму перед литьем.
Узлы быстрой смены инструмента (Tool Changers): Обеспечивают гибкость производственной ячейки, позволяя роботу менять оснастку за секунды для выполнения разных операций.
Сенсорные системы: Датчики контроля присутствия, усилия и положения, которые отслеживают качество изделий, факт извлечения из формы и корректность захвата.
Как работает система на производстве
Функционально EOAT выполняет роль высокотехнологичной "кисти" робота, следуя запрограммированному алгоритму:
Извлечение: С помощью активного модуля (захвата или присоски) готовая деталь аккуратно извлекается из пресс-формы после отливки и остывания.
Транспортировка: Изделие перемещается к следующему этапу технологической цепочки — на участок обрезки облоя, упаковки, сортировки или на конвейер.
Дополнительные операции: В процессе перемещения система может выполнять вторичные действия, такие как отделение литников, разделение или ориентирование детали.
Выгоды от внедрения роботизированной оснастки
Интеграция специализированных EOAT в производство пластиковых изделий приносит ряд стратегических преимуществ:
Рост производительности: Автоматизация рутинных операций ускоряет цикл обработки и позволяет вести круглосуточную работу без потерь в качестве.
Стабильность качества: Робот, управляемый программой, исключает влияние человеческого фактора, обеспечивая повторяемость и точность каждого движения.
Оптимизация затрат: Сокращается доля ручного труда, минимизируются потери от брака, что в долгосрочной перспективе снижает себестоимость.
Адаптивность линии: Благодаря модульности и системам быстрой смены, перенастройка под новую задачу или изделие занимает минимум времени.
Оснастка EOAT является фундаментом для построения эффективных и гибких автоматизированных комплексов в переработке пластика. Ее правильный выбор и интеграция напрямую влияют на точность, скорость и рентабельность всего производства. Для достижения оптимального результата критически важно учитывать специфику конкретных задач, и наши специалисты готовы помочь в подборе и настройке оборудования для ваших технологических процессов.